


Allgemeines
Schaltabstand
Der Schaltabstand vom Sensor zum Magnet oder anderen zu detektierenden Objekt ist abhängig von der
- Sensitivität des eingesetzten Sensors
- Art des Magneten (Material)
- Form und Größe des Magneten
- Der relativen Bewegung des Magneten zum Sensor
- Einfluss anderer magnetischer oder metallischer Materialien im Umfeld
EMV Schutz
- Reed-Sensoren sind bauartbedingt immun gegen EMV-Einflüsse
- Bei Hallsensoren gibt es Versionen die über eine integrierte Schutzbeschaltung verfügen, welche die Anforderungen gemäß IEC 1000-4-2 nach der Testmethode EN50082-2 erfüllen. Dazu zählen u. a. GS1001, GS1012 und SD1012.
Sensoren ohne integrierte Schutzbeschaltung sind unter Beachtung der entsprechenden EMV-Schutz-Richtlinien zu handhaben.
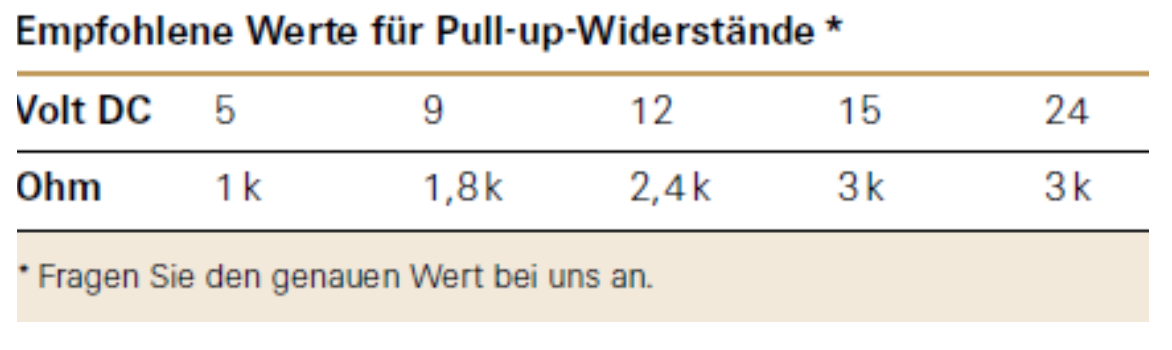
Offener Kollektorausgang
3-Draht-Schnittstelle
Offene Kollektorausgänge werden häufig in negativ-logischen Anwendungen eingesetzt, die im durchgeschalteten Zustand ein Low-Signal verwenden. Ist das Bauteil durchgeschaltet, sorgt ein abgefallener Signalpegel für dieses Spannungssignal in der Ausgangsleitung. Offene Kollektorausgänge sind kompatibel mit allen Logikfamilien, da sie für eine große Bandbreite an Versorgungsund Ausgangsspannungen verwendet werden können. Die verwendete Versorgungsspannung der Hallbaugruppe kann darüber hinaus von der Pull-up-Spannung abweichen, an die sie angeschlossen ist. Der externe Pull-up-Widerstand zwischen Ausgang und Versorgungsspannung wird für eine einwandfreie Funktion benötigt. Ist der Widerstand wie dargestellt angeschlossen, wird das Ausgangssignal im nicht durchgeschalteten Zustand auf das Niveau der Versorgungsspannung (Vcc) „gezogen“ und im geschalteten Zustand auf (annähernd) Masse.
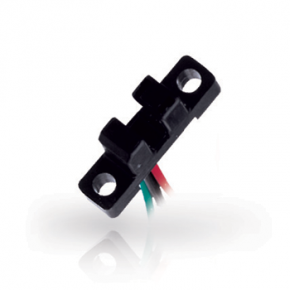
Anschluss / Schnittstellen
Die Kontaktierung der Sensoren erfolgt je nach Art und Ausführung entweder über einen Anschluss für einen definierten Standardstecker oder über Litzen für eine individuelle Anbindung.
Gehäuse
ZF-Sensoren sind einbaufertig gemäß der angegebenen Schutzklasse gekapselt.
Lebensdauer
Die Drehzahlsensoren von ZF basieren auf Halbleiterelementen ohne bewegliche Teile, sodass die Lebensdauer aufgrund des Funktionsprinzips nahezu unbegrenzt ist.
Magnetische Näherungssensoren
Magnetische Näherungssensoren
Sensoren als magnetische Näherungsschalter werden für die berührungslose und damit verschleißfreie Bestimmung von Positionen und Bewegungen eingesetzt. ZF bietet hierfür als Standardprodukte Lösungen auf Basis der Hall- und der Reed-Technologie an.
Hall oder Reed?
Obwohl beide Sensorarten die Annäherung von Magneten detektieren, unterscheiden sich die Funktionsprinzipien grundsätzlich. Hallsensoren sind Halbleiterelemente (Festkörper), deren Ausgangssignal sich gegenüber einem Magneten verändert. Reedsensoren dagegen sind elektrisch gesehen Schalter, bei denen sich zwei feine Kontakte in einer Vakuumglasröhre befinden, die sich gegenüber einem Magnetfeld entweder öffnen oder schließen.
Was spricht für die Verwendung eines Hall Sensors?
Für Hallsensoren spricht die nahezu unbegrenzte Lebensdauer, z. B. zur Erfassung eines rotierenden Magneten, der millionenfach am Sensor vorbeifährt. Reedsensoren haben ebenfalls eine sehr hohe Lebensdauer, verglichen mit anderen elektromechanischen Lösungen, aber den bauartbedingten Vorteil der extrem hohen Lebenserwartung eines Hallsensors erreichen sie nicht. Somit sind Hallsensoren beispielsweise prädestiniert für Zahnradoder Drehzahlerfassung, während Reedsensoren auf binäre Positionsabfragen begrenzt sind.
Was spricht für die Verwendung eines Reed Sensors?
Reedsensoren haben den Vorteil, dass sie im Stand-by keinen Strom verbrauchen und somit äußerst energieeffizient sind. Sie sind EMV-unempfindlich und stellen eine kostengünstige Alternative zur Halltechnologie dar, die hier Schutz benötigt. Ein weiterer Einsatzbereich für die Reedtechnologie sind Anwendungen, deren Versorgungsspannung außerhalb des für Hall üblichen Bereichs von 5 – 24 V DC liegt. Hier können Reedsensoren auch Schwachstromanwendungen mit 110 V DC effektiv schalten.
Reedsensoren
Reedsensoren sind in unterschiedlichen Kontaktkonfigurationen erhältlich:
Schließer (Form A)
Bei Annäherung eines Magnetfeldes schließt der Kontakt.
Öffner (Form B)
Bei Annäherung eines Magnetfeldes öffnet der Kontakt.
Wechsler (Form C)
In Ruhestellung ist Anschluss COM mit dem Anschluss NC verbunden. Nähert sich ein Magnetfeld, wird der Kontakt zwischen COM und NC getrennt und zwischen COM und NO geschlossen.
Polarität
Die meisten Hall-basierenden Standardsensoren von ZF sind unipolar und schalten gegen den Südpol des Magneten.
- Eine Ausnahme bilden die Typen MP101303 und MP101304, die gegen Südpol schließen und gegen Nordpol wieder öffnen.
- Die MP1021-Serie bietet sowohl unipolare Varianten, die gegen den Nordpol schalten, als auch bipolare Varianten, die gegen den Nordpol öffnen und gegen den Südpol schließen.
- Alle Reedsensoren von ZF (MP2007 bis MP2019) sind omnipolar.

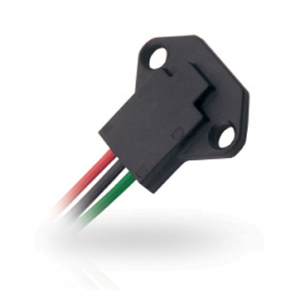
Luftspalt (Abstand Sensor – Magnet)
Die Stärke des Magnetfeldes eines Permanentmagneten hängt von verschiedenen Faktoren ab. Wesentlich sind dabei insbesondere Form, Größe und Material des Magneten. Die meisten ZF-Standardsensoren weisen eine ähnliche Sensitivität auf, wobei es einige Ausnahmen gibt. Es sind die bistabilen Versionen der Sensoren MP101303 und MP102104, die einen relativ niedrigen Gauss-Schwellwert haben und einen etwas größere Luftspalte ermöglichen.
Schalthysterese
Die Schalthysterese bezeichnet den Wegunterschied zwischen dem Einschaltpunkt beim Annähern und dem Ausschaltpunkt beim Entfernen des Magneten vom Sensor.
Zahnradsensoren
Zahnradsensoren
Die Gruppe der Zahnradsensoren umfasst sowohl reine Drehzahlsensoren als auch kombinierte Drehzahl- und Drehrichtungssensoren.
Drehzahl- und Drehrichtungsmessung
Die Sensoren der SD-Serie liefern sowohl eine Drehzahl als auch eine Drehrichtungsinformation. Dies wird dadurch realisiert, dass in dem Sensor zwei Hall-ICs leicht zueinander versetzt positioniert werden. Die daraus resultierende
minimale Phasenverschiebung der beiden Signale wird mittels einer internen Logikanalyse aufbereitet und so die Drehrichtung ermittelt. Die Informationsausgabe erfolgt über zwei digitale Ausgangssignale. Diese nutzen einen Open-Collector-Ausgang bei dem das Geschwindigkeitssignal von High (Vcc) auf Low (nahe Null) umspringt, wenn der Sensor einen Übergang von „kein Zahn“ auf „Zahn da“ erkennt. Die am separaten Pin ausgegebene Drehrichtung ist ein High-Signal, wenn die Drehung im Uhrzeigersinn erfolgt, bzw. ein Low-Signal, wenn die Drehung gegen den Uhrzeigersinn erfolgt.
Einsatz von Drehzahlsensoren
Obwohl sie allgemein als Zahnradsensoren bezeichnet werden, können Drehzahlsensoren auf Halbleiterbasis nicht nur Drehzahlen von Zahnrädern erfassen. Sie eignen sich ebenfalls für die Erfassung von Drehungen oder Bewegungen unterschiedlichster Objekte, auch mit unregelmäßigen Formen, solange diese magnetisch leitend sind. Beispielsweise auch:
- Kettenrollen
- Bolzenköpfe
- Zahnkränze
- Vertiefungen in glatten Oberflächen
Als Material für das zu messende Zielobjekt kommen prinzipiell alle ferromagnetischen Werkstoffe in Frage. Empfohlen wird Eisen oder Stahl. Dabei haben die Form der Zielobjekte, die Höhe der Zähne und deren Abstand sowie weitere Faktoren natürlich einen Einfluss auf die Erfassbarkeit.
Orientierung
Sensoren der GS-Serie sind nicht orientierungssensitiv bei der Montage. Die kombinierten Drehzahl- und Drehrichtungssensoren der SD-Serie dagegen benötigen eine bestimmte Ausrichtung und verfügen über entsprechende Kennzeichnungen auf dem Gehäuse.
Frequenz
Die maximal erfassbare Signalhäufigkeit ist abhängig von der Sensortype und dem zu erfassenden Objekt.
Die maximale Frequenz liegt aber generell im Bereich > 10 kHz. Bei der Frequenzermittlung ist dabei auf die Zielgeometrie zu achten. Bei asymmetrischen Zielen mit schmalen Zähnen im Verhältnis zum Abstand zwischen den Zähnen ist die Zeit zwischen der ansteigenden und der abfallenden Kante des Zahnes der entscheidende Faktor. Die ZF-Sensoren haben eine maximale Reaktionszeit von etwa 10 μs bei der MP-Serie bis etwa 50 μs bei der GS-Serie, bedingt durch die Reaktionszeit des Hall-Elementes. Wenn die benötigte Reaktionszeit sehr nahe an diesen Grenzen liegt, kann dies zu unerwarteten Ergebnissen, wie unerfassten Zahnimpulsen, führen. Anders als bei passiven Drehzahlsensoren, den sogenannten VR-Sensoren (variable Reluktanz), ist die Ausgangsamplitude der GS-Sensoren unabhängig von der Eingangsfrequenz (Drehzahl). Das bedeutet, dass der Sensor grundsätzlich keiner Mindestdrehzahl bedarf. Eine kurze Initialbewegung des Zielobjektes ist allerdings trotzdem notwendig, damit der Sensor eine Zahnflanke als Startimpuls erkennt. Wir bevorzugen daher, von einem Sensor für Drehzahlen nahe Null zu sprechen.
Lebensdauer
Die Drehzahlsensoren von ZF basieren auf Halbleiterelementen ohne bewegliche Teile, sodass die Lebensdauer aufgrund des Funktionsprinzips nahezu unbegrenzt ist.
Gabelschrankensensoren
Gabelschrankensensoren
Gabelschrankensensoren detektieren Impulse eines Flügelrades, welches durch die Gabel läuft. Dabei verändert der ferromagnetische Flügel das Magnetfeld zwischen Sensor und Magnet in den beiden Gabelarmen.
Vorteile eines Gabelschrankensensors gegenüber einer optischen Lichtschranke
Der Gabelschrankensensor bietet einige Vorteile, abhängig von Ihrer Applikation.
- Da optische Lichtschranken auf die Detektion von Licht angewiesen sind, können Verunreinigungen die Lichterkennung hemmen und somit die Sensorleistung beeinträchtigen. Gabelschrankensensoren sind gegen Staub, Schmutz und Fett immun.
- Gabelschrankensensoren arbeiten auch unter hohen Temperaturen zuverlässig. ZF bietet die Standard Variante mit einer maximalen Betriebstemperatur bis 125°C an.
- Wenn Lichtschranken aufgrund von widrigen Umgebungsbedingungen gestört oder unterbrochen werden können, bietet die Verwendung eines Gabelschrankensensors ebenfalls Vorteile.
Flügelrad – Material
Als Material für das Flügelrad kommen prinzipiell alle ferromagnetischen Werkstoffe in Frage. Empfohlen wird Eisen oder Stahl.
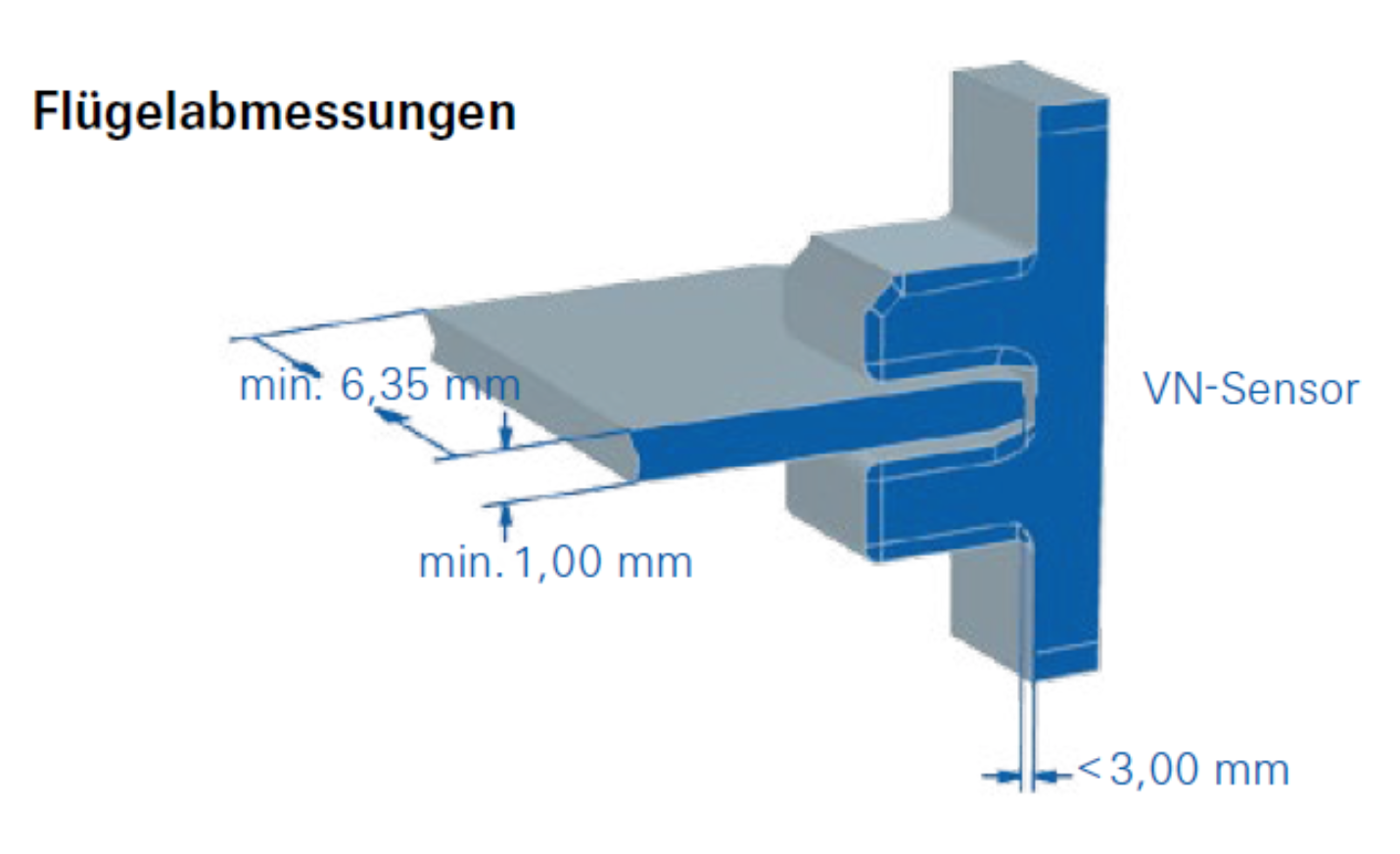
Flügelrad – Dimensionen
Das Material, aus dem das Flügelrad besteht, sollte mindestens eine Stärke von 1 Millimeter haben und ein einzelner Flügel eine Breite von mindestens 6,35 Millimeter. Die Flügel sollen den Boden der Gabelschranke mit einem Abstand < 3 Millimeter passieren.