






Distributor Stock Check
Environment
 Find a Distributor
Find a DistributorSearch our established network of franchised distributors and representatives in the Americas region
 Downloads
DownloadsAccess and download our interactive catalogues, technical specifications, application notes and other useful supporting data here.
 Contact UsDo you have any questions about our latest innovations or our product portfolio? Then get in touch with us using this contact form.
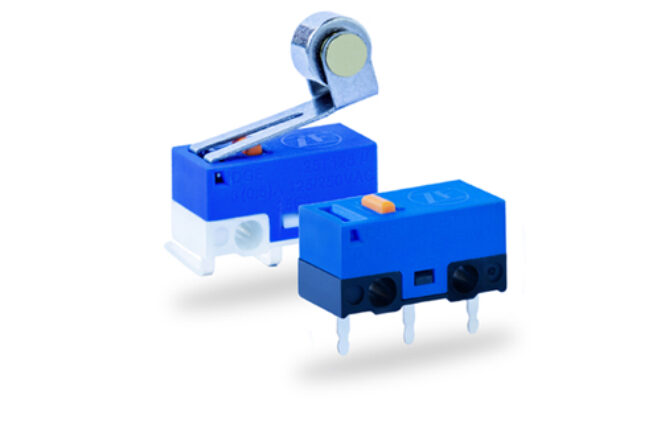
Contact UsDo you have any questions about our latest innovations or our product portfolio? Then get in touch with us using this contact form.Featured Products



Press Center

Uncategorized12/03/2024
ZF Portfolio Switches & Sensing Solution at Light + Building 2024 in Frankfurt
More Information



Energy Harvesting26/09/2022
